The three wheels balancing robot is similar to a ballbot from the point of view of the goal. In comparison to ballbot which balance itself on a single ball, three wheels balancing robot is designed to balance itself on a single rod. The common characteristics of this kind of robots is that there’s one sole contact point to the ground.
Remigijus Sutkus from Lithuania (ReM-RC YouTube channel) made a mechatronic project which is an interesting example of three wheels balancing robot. This is one of his projects in which reaction wheels were used. A reaction wheel is a type of flywheel used primarily by spacecraft for three-axis attitude control. It does not require rockets or external applicators of torque. A reaction wheel provides a high pointing accuracy, and is useful when the spacecraft must be rotated by very small amounts.

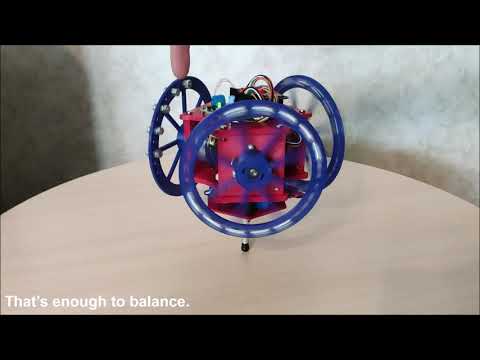
Let's go back to Earth, where there is gravity and where Remigijus used the reaction wheels to balance the mechatronic system on a single rod. He combined education with fun like a real mechatronics enthusiast:
I did this to understand how it works. Robotics and programming is my hobby.
For testing, a low-cost and low-power system on a chip microcontroller ESP32 was used for continuous analysis of the balance stabilization process. Remigijus assumes that it should also work with ATmega 328. MPU6050 sensor (accelerometer and gyroscope) was used for measuring acceleration and angular velocity in three axes.





Nidec 24H PWM brushless BLDC motors with 2 channel encoder were used to drive the reaction wheels. He tried to use encoders, but he didn't find any positive effect. In this project he didn't use it. The mechanical parts were 3D printed.
The whole mechatronic project weight is 730 grams, and it is stabilized by three wheels each weighing 55 grams.
Comments